В мире беспилотных технологий выбор базового автомобиля для прототипа — это не просто технический вопрос, а стратегическое решение, отражающее философию и бизнес-подход компании-разработчика. Какие автомобили становятся основой для беспилотных технологий? Что влияет на этот выбор? Как устроены современные беспилотные прототипы? Давайте разберемся в этих вопросах.
Электромобили как предпочтительная платформа
Анализ рынка беспилотных технологий показывает четкую тенденцию: подавляющее большинство разработчиков выбирают электрические или гибридные автомобили в качестве основы для своих прототипов. Это стратегический выбор, обусловленный несколькими факторами:
- Символическое значение: Электромобили ассоциируются с будущим, инновациями и экологичностью. Компании-разработчики стремятся связать свой продукт с прогрессивными технологиями.
- Привлечение инвестиций: Инвесторы охотнее вкладываются в проекты, которые объединяют два перспективных направления — электромобильность и автономное вождение.
- Техническая совместимость: Электрические автомобили обычно имеют более современную электронную архитектуру, что упрощает интеграцию сложных беспилотных систем.
Многообразие выбора: отсутствие единого стандарта
Интересно отметить, что на рынке беспилотных технологий нет единообразия в выборе моделей для разработки. Компании руководствуются различными факторами:
• Локальная экосистема: Доступность определенных моделей в регионе разработки
• Инвестиционные возможности: Стоимость приобретения и модификации автомобилей
• Простота интеграции: Легкость подключения к CAN-шине и другим системам автомобиля
• Политический контекст: Выбор моделей местного производства для получения государственной поддержки
Это разнообразие свидетельствует о том, что индустрия беспилотных автомобилей все еще находится на стадии формирования, когда единые стандарты еще не определены.

Лидеры среди моделей: анализ популярных платформ
Среди всего многообразия автомобилей можно выделить несколько моделей, которые пользуются наибольшей популярностью у разработчиков беспилотных технологий:

Toyota Prius стал выбором таких разных игроков, как Яндекс, Waymo и Nuro на ранних этапах их развития, хотя сейчас многие из них перешли на другие модели.
Популярность Toyota Prius можно объяснить его доступностью, надежностью и репутацией инновационного гибрида, что делало его идеальной платформой для первых экспериментов с беспилотными технологиями.
Chrysler Pacifica, с другой стороны, привлекает своими размерами, что делает его удобным для использования в качестве такси или в сервисах райдшеринга.
На втором месте по популярности находятся Nissan Leaf и Toyota Sienna Autono-MaaS, каждую из которых используют три компании. Toyota Sienna Autono-MaaS особенно интересна тем, что была специально разработана для интеграции беспилотных технологий, о чем говорит даже ее название (MaaS – Mobility as a Service, “Мобильность как услуга”).
Nissan Leaf привлекает разработчиков своей полностью электрической платформой и глобальной доступностью, что делает его привлекательным выбором для компаний из США, Великобритании и Китая.

Ford, Lincoln, Renault и GAC

Третье место делят между собой Ford Fusion, Lincoln MKZ, Renault Twizy и китайский электрический SUV Aion от GAC. Интересно отметить географическую специфику выбора: Ford Fusion предпочитают американские компании (Argo.ai и Uber), Lincoln MKZ — компании с китайско-американскими корнями (AutoX и WeRide), компактный Renault Twizy выбирают британские экспериментаторы (Оха и Wayve), а китайские разработчики (WeRide и Baidu) предпочитают электрический SUV от GAC.
Сегментация рынка: какие типы автомобилей выбирают разработчики
Анализ данных показывает интересную картину предпочтений разработчиков беспилотных технологий относительно автомобильных сегментов:
SUV: лидер по популярности
Кроссоверы и внедорожники (SUV) занимают первое место среди выбираемых платформ, что отражает общемировую тенденцию автомобильного рынка. По данным исследований, в США и Европе на SUV приходится около половины всех приобретаемых автомобилей, а в Китае более 53% водителей выражают желание перейти на этот тип транспорта.
Компании-разработчики разумно ориентируются на самый массовый сегмент автомобильного рынка, что увеличивает потенциальную аудиторию их продукта. Среди производителей SUV, выбираемых для разработки беспилотных технологий, представлены компании со всего мира: китайские (GAC, Arcfox, WM), европейские (Volvo, Polestar), американские (Ford) и азиатские (Toyota, Hyundai).







Автомобили С-сегмента: баланс доступности и функциональности
Автомобили С-сегмента (компактные) также пользуются большой популярностью среди разработчиков. Nissan Sylphy, Kia Ceed, Toyota Prius, Nissan Leaf — эти модели привлекают внимание благодаря своей доступности, распространенности и достаточному размеру для размещения технологического оборудования.
Интересно, что российские проекты отдают предпочтение брендам Kia и Hyundai в этом сегменте, в то время как многие международные компании выбирают модели Toyota и Nissan.


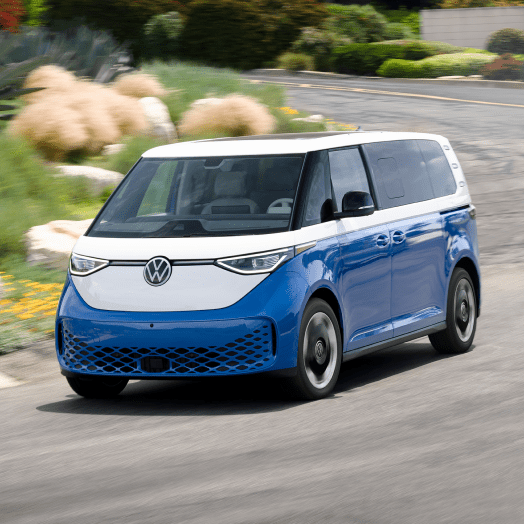
Минивэны: идеальны для роботакси
Минивэны (Toyota Sienna Autono-MaaS, Id.Buzz, Chrysler Pacifica) становятся предпочтительной платформой для разработки роботакси благодаря своей вместительности и удобству для пассажиров. Их просторный салон позволяет разместить не только пассажиров с багажом, но и необходимое технологическое оборудование.
Европейские производители (Volkswagen с Id.Buzz и Navya с Autonom Cab) ориентируют свои минивэны на шеринговое использование, что отражает европейские тенденции в транспортной сфере.



Сенсорные системы: глаза и уши беспилотного автомобиля
Современные беспилотные автомобили используют сложные комбинации сенсоров для восприятия окружающего мира. Основными типами датчиков являются
Лидары: прецизионное зрение
Лидары — это лазерные датчики, создающие трехмерную картину окружающего пространства с высокой точностью. Они способны измерять расстояние до объектов с точностью до сантиметров, что делает их незаменимыми для точного позиционирования и обнаружения препятствий.
Большинство разработчиков беспилотных автомобилей используют лидары, несмотря на их высокую стоимость (от 5 до 15 тысяч долларов за штуку). Исключение составляют Tesla, comma.ai и Ghost, которые делают ставку на системы компьютерного зрения на основе камер.
Роботакси, работающие в сложной городской среде, используют наибольшее количество лидаров для максимальной точности, в то время как разработчики личных беспилотных автомобилей стремятся ограничить их число для сохранения привычного дизайна и снижения стоимости.
Радары: определение скорости и направления
Радары излучают радиоволны и, анализируя их отражение, определяют расстояние до объектов, их скорость и направление движения. Они делятся на радары дальнего действия (для обнаружения объектов на большом расстоянии) и ближнего действия (для контроля “слепых зон”).
Радары используются во всех типах беспилотных автомобилей, но их количество варьируется: от двух у Argo.ai до 21 у Cruise. Некоторые компании, например Tesla, периодически меняют свое отношение к радарам, то включая их в свои системы, то исключая в пользу систем компьютерного зрения.
Камеры: доступное решение с богатыми данными
Камеры — самый доступный и информативный тип сенсоров, предоставляющий богатые визуальные данные. Их преимущество заключается в способности различать цвета, текстуры и читать дорожные знаки. Кроме того, существует обширная экосистема алгоритмов компьютерного зрения для обработки данных с камер.
Количество камер также сильно варьируется: от 8 у Tesla до 16 у Cruise. Компании активно разрабатывают технологии для получения трехмерной информации из двумерных изображений, используя стереокамеры и алгоритмы глубинного обучения.
Сонары: ультразвуковая точность
Сонары (ультразвуковые датчики) используются для точного определения расстояния до близлежащих объектов, особенно при маневрировании на малых скоростях. Наиболее активно их применяют Tesla и Baidu (по 12 сонаров).
Заключение: формирование будущего мобильности
Анализ прототипов беспилотных автомобилей показывает, что индустрия находится в стадии активного формирования, где пока нет единых стандартов и подходов. Компании-разработчики экспериментируют с различными платформами, сенсорными системами и бизнес-моделями, стремясь найти оптимальное решение для различных сценариев использования беспилотных технологий.
Несмотря на разнообразие подходов, можно выделить несколько ключевых тенденций:
1. Выбор в пользу электромобилей: Большинство разработчиков отдают предпочтение электрическим или гибридным платформам, что отражает общее движение автомобильной индустрии к электрификации.
2. Ориентация на массовые сегменты: Наибольшей популярностью пользуются SUV и автомобили L-сегмента, что соответствует глобальным предпочтениям потребителей.
3. Разные подходы к использованию лидаров:
Компании по-разному оценивают необходимость лидаров: одни считают их критически важными для безопасной навигации, другие стремятся обойтись без них ради удешевления решений. Эта дискуссия остается открытой.
4. Комбинирование сенсоров для надежности:
Независимо от отношения к лидарам, большинство компаний используют комбинацию сенсоров (камеры, радары, лидары и др.), чтобы повысить устойчивость системы к различным дорожным и погодным условиям.
Беспилотные технологии постепенно переходят от экспериментальной стадии к коммерческому внедрению, и выбор базового автомобиля для прототипа приобретает характер стратегического решения, определяющего не только технические характеристики, но и рыночный потенциал конечного продукта.
